�繤�����ӡ����ϼ���ʵѵ�豸
��ʽͨ�õ繤�����ӡ�����ʵѵ�豸
���Ӽ��ܼ���������ʵѵ�豸
�����ܵ繤�����ӡ����ϡ�����ʵѵ�豸
ά�繤ʵѵ�����豸
����缼��ʵѵװ��
ũ��ͨ��ϵͳ��·ʵѵװ��
�����������ƹ���ʵѵװ��
PLC�ɱ��ʵѵװ��
PLC��̼��Զ���ʵ�����豸
���õ���ʵѵ�豸
PLC����Һѹ������ʵѵװ��
����һ�廯ʵѵ�豸
��Ƶ���١���ҵ�Զ���ʵѵװ��
���ػ�������ά��ʵѵ�����豸
��ͨ����ʵѵ�豸
��������������ѵ������װ��
ǯ��ʵ��̨����í��ʵѵ�豸
����¥��ʵѵ�豸
������ͼʵ�����豸
�ƻ�ģ��ʵ�����豸
�������̿���ʵѵװ��
���ܡ�̫���ܷ���ʵѵװ��
ú��ȫ������ѵװ��
�����ͨʵѵϵͳ�豸
���������������Ʒʵѵװ��
��е���̼���ʵѵ�豸
���̻�еģ���ѧ��
����ģ���ʻ��
����������ʵѵ�豸
����ȫ������ʵ��̨
�����յ�ϵͳʵ��̨
����ʵ�����ģ��
��������ʵѵ�豸
����������ʵѵ̨
������������װ����ת���豸
����ʾ�̰�
�����̿ص�̰�
��������ѧģ��
���������ۺ�ʵѵϵͳ
������У��ѵ�豸
����Դ������ѧʵѵװ��
����ʵ����
��ʽͨ�õ繤�����ӡ�����ʵ���ҳ����豸
�繤��ģ�硢���硢��������ʵ�����豸
���ó���ʵѵ��ѧ�豸
ע�ܻ���ʾģ��
��ҵ������ʵѵ�豸
ũ����ѧ�豸
���˻�װ���ۺ�ʵѵװ��
������������ʵѵ�豸
���繤�����ӡ����ʵ�����豸
�繤�����ӡ����������ʵ�����豸
���ؼ���ʵ�����豸
���õ�������ʵ�����豸
��Ƭ����ʵ��װ��
�������ۺ�ʵ��̨
�յ���������ʵ�����豸
��ý�����������豸
�������ѧ����ģ��
������ʵ�����豸
��������ʵ��װ��
������ѧʵ�����豸
�ȹ����ѧʵ��װ��
����ԭ��ʵ��װ��
������Ԫ����ʵѵװ��
��ҩ����ʵ��װ��
��ůͨ��Ϳյ�����ʵ��װ��
��ѧ���̻�ѧ����ʵ��װ��
��ѧʵ����
��еʾ�̳��й�
��е��ý���������ۺ�ʵ��װ��
��е���½�ѧģ��
��ѧ���ƽ�ѧ����
��е��ѧ��ͼ
��е�����豸
�ķθ���ģ����
��ѧ������
��Ʒչʾ
��ҳ
>
��Ʒչʾ
>
������������ʵѵ�豸
>
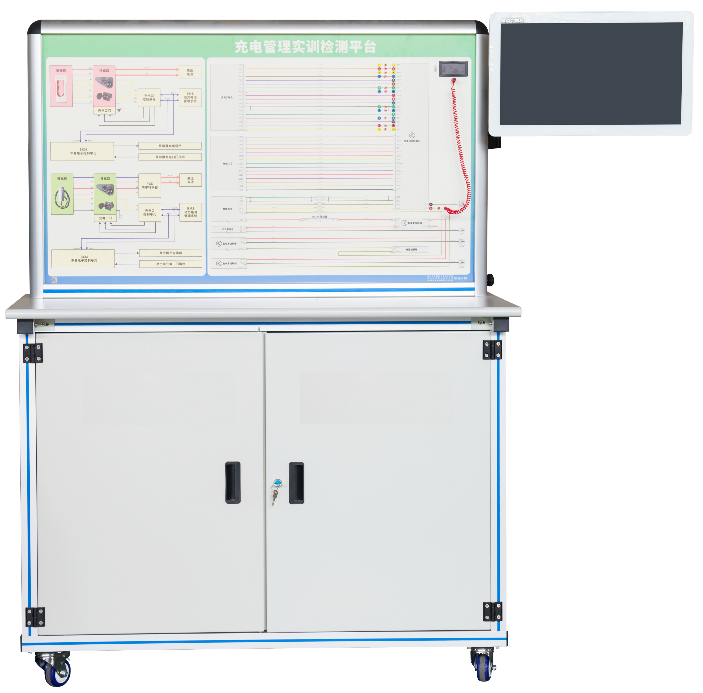
SG-ZNWL07 ����������ʻƽ̨
һ����Ʒ���
ƽ̨�������������������ִ��������߿ص��̿���һ��Ľ�ѧϵϵͳ�����ð�����ת����߿ص��̣���װ��360��ɨ��ʽ�����״ǰ����������ͷ�����ײ��״���ɹ��������Ǻ�GNSS����϶�λ��Ԫ���������״ﴫ���������жೡ��������ѭ�������ؽ�ͨ��ʶ���Զ���ʻ���ܣ�������Զ���ʻ������ʾ����������װ����ʵѵ���߿ص��̰�װ����ʵѵ����������ʻ����ʵѵ��
�����Ƚ���AI���ѧϰ�˹����ܣ��ɽ���ͼ��ʶ��SLAM��λ��������֪���ϰ���̽�⡢��ͨ��ʶʶ�𡢶ഫ�����ںϡ��Զ���ʻ��������ƵȽ�ѧ���о�����Դ��֧�ֶ��ο�����ͨ�����˼�ʻϵͳ�������������Ϥ���˼�ʻ����ϵͳ��Ӳ��ϵͳ�ṹԭ�������մ�������װ���ԡ��߿ص��̰�װ���Եȼ��ܡ�
ƽ̨��ʵ����������������������������������ά����������֪ϵͳ���ټ����״���Ӿ�������������ͷ�����ۺ��ײ��״�ܹ��Ե��������������ɹ��������Ǻ�GNSS����϶�λ��Ԫ�����ݳ������״ﴫ���������߿ص���ϵͳ��װ������ԡ����ϼ��ά�ޡ�
�����߿ص���
�����βο�ͼ���Խ���ʵ��Ϊ��
1�����γߴ磺��1200*��800*��1020mm
2����Сת��뾶��1.5m
3����ࣺ735mm
4���־ࣺ725mm
5����С��ؼ�϶��155mm
6����̥���12�絥������
7����߳��٣�10km/h
8��������¶ȣ�20%
��9��������̣�50km
10��ת����ʽ��ǰ��ת��
11��������ʽ����챺���
12�����ѹ��36V
13������ʣ�350W
14���ת�٣�250-350RPM
15���������7.5-8.5A
16�����Ť�أ�22.3N/m
17�������Ƕȣ�120��
18���Ÿּ��٣�40��
19�����᷽ʽ������������
20��ɲ����ʽ�����ɲ
21����ˮ�ȼ�IP55
22�������150kg
23������������-20��65��
24��ת�����ʣ�400W
25��ת����ѹ��DC12V��24V
26��ת����ص�����<500ma
27���������>1,000,000��/������
28������������ͣ��������
29��������ص�����40ah2048Wh
�����Զ���ʻϵͳ
1. ���㵥Ԫ
1)CPU:������Ӣ�ض�12��6��12�̣߳���Ƶ2.5G����������18M��
2)GPU: ����ͼ��������CUDA����������3584���Դ�Ƶ��15Gbps���Դ����� 8G DDR6��
3)�ڴ棺16GB LPDDR4 x 2666MhZ
4)�洢����̬Ӳ��500GB
5)�ӿڣ�����Ϊǧ����̫��+WiFi�� USB3.0
2. ǰ������ͷ
1)Sensor IMX291��lens Size 1/2.8��
2)USB3.0�ӿڣ�
3)�����Ч����Ӳ��200������ 1920��H��*1080(V)��
4)���ͼ���ʽMJPEG/YUV2(YUVY��
5)֧�����֡�� 1920*1080p 50֡/YUV/MJPEG
3. 16�����״�
1)ˮƽ�ӽǣ�360�ȣ�
2)��ֱ�ӳ��ǣ�-16°-+14°
3)̽����룺150m
4)����ȣ�±3cm
5)���ͨ��������16��
6)�ṩ������̫������������������롢��ת�Ƕȡ������ʵ���Ϣ
7)�����¶��������㣺-20��-85��
8)������ѹ��9-32V
9)�����ȼ���������IP67
4. ��϶�λ��Ԫ
1)֧��GNSSʵʱRTK���ܣ����ṩ����ͨ��Э�飻
2)���ø߾���MEMS���ݡ����ٶȼƼ���ģ��ƵGNSS���ջ�
3)���ȣ�0.2° �����߳��� 1m����1σ��
4)λ�þ��ȣ�����≤2m��CEP����RTK≤2cm+1ppm��CEP��
5)�����ѹ��24V DC ���10~32V DC��/2A
6)���ݣ����� ±300°/s ��ƫ�ȶ��� 5.5°/h
7)���ٶȼƣ����� ±6g ��ƫ�ȶ��� 0.06mg
5. ���ײ��״�
1)����Ƶ�ʷ�Χ��76GHz - 77GHz��
2)̽����뷶Χ��Զ�ࣩ��0.2m - 250m��
3)��������ֱ��ʣ�Զ��±1.79m������±0.39m
4)����������ȣ�Զ�� ±0.40m������ ±0.10m
5)�ٶȷ�Χ��-400 km/h...+200 km/h (- ȥ��Ŀ��... + ����Ŀ��)
6)�ٶȷֱ��ʣ�Զ�� 0.37km/h������ 0.43km/h
7)�ٶȾ��ȣ�±0.1 km/h
8)̽��Ŀ�����ͣ�Զ��Ŀ�ꡢ����Ŀ�ꡢ��ֹĿ�ꡢ�ᴩ��ֹĿ�ꡢ�ᴩĿ�ꣻ
9)�ṩCAN/CANFD������������ٰ�������Ŀ��ID�����롢�ٶȡ�RCS����Ϣ��
10)�����¶��������㣺-40��-85�棻
11)������ѹ��9-16V��
12)�����ȼ���IP6K 9K/IP6K7
6. �������״�
1)������Դ�� +12V��24V
2)�����¶ȷ�Χ�� ��40�桫��85��
3)���������� 200mm�D3500mm
4)����:̽������ 0.5%
5)�ֱ��ʣ� 5mm
6)ͨ�Žӿڣ� ���� CAN2.0A CAN2.0B
7)�����ʼ��������ڣ� 100ms
8)̽ͷ����ǣ� 60 ��
7. ��ʾ��
1)ˢ����≥70HZ��
2)֧�ֵ�ѹ12V��
3)24�����
8. ·����
1)֧��Ƶ�Σ�4G ȫ��ͨ
2)���ߣ�˫����
3)����ӿڣ�4������Ӧ 100/1000 Mbps LAN��
4)���磺 12V
9. CAN�շ���
1)���о�������� ��ӿ������ ͨѶ����
2)�����¶� ��ҵ���� -40~85��
3)���÷�ʽ����ҳ�����ý���
�ġ������ص�
��1�������ṩAutoware��Apollo�����Զ���ʻϵͳ��������������ϵͳ��������ʻ��
2���Զ���ʻϵͳ�������߾���ͼ�����Զ���ʻ���ܣ�����ʵ������ѭ�����ϰ���ʶ������ɲ����վ��ͣ�����ֲ�·���滮�ȹ��ܣ�
3���ṩ������ʻ���������ÿؼ����ɶ��Զ���ʻϵͳ����ʽ���Խ��е�����
4���Զ���ʻϵͳ�߱����ɸ߾���ͼ��ϢԴ�ij���¼�Ƶ������ݰ�������ʹ�õ�ͼ�������������߾���ͼ��
5���ṩ���ִ���������Ӧ�õ�ʵѵ�������ɶԴ�����������һ��ѧ��
6���Զ���ʻϵͳ��϶��ֶ�λ��������������ʵ��ѭ���������߾���ͼ��ʻ��
�塢������λ������ָ��
1�������״��ѧ����
(1)ͨ����λ���������ü����״������������̫����ʱ�䡢��������ȣ����ռ����״������������ӻ���ʾ���ơ�
(2) ����ͨ���������ü����״���ⲿ����x��y��z��ֵ�����ǣ�����ǣ������ǵ�ֵ���б궨��
(3)ͨ�������״��֪�㷨�ؼ���ͨ������̽�ⷶΧ���˲���ֵ���ָ�����Ȳ������ı����ʶ��״̬�����ϰ�����б�ʶ��ʵ�ֶԼ����״�ʶ���㷨�����⣻���Բ���ϰ���������̨�����ľ��롣
(4)���ð�ȫ����ȫ�������ϰ��ォ����ʶʶ��
(5)��������Դ���룬�ɵ��ü����״�ʵʱ���ݣ�¼�Ƶ����ݰ�������ʵѵ̨������ơ�
��(6)����ROS2ϵͳ������֧��������������ģ��� ROS2 ��������������ʵ�����ݵĽ������ںϡ������ṩ��Ƶ��ʾ��
(7) �������ż��γ��ĵ����������롢���Ĺ��ܽ���������������ϸ˵������������������������
��(8)�ײ��㷨��Դ������ ROS2 ��ܿ�ʵ�ּ����״������������𡢹��ܰ����������У�֧���״����ԭʼ���ݵIJɼ����������������ⷢ������ʵ�ּ����״���ƿ��ӻ����ϰ�����ȹ��ܡ������ṩ��Ƶ��ʾ��
��(9)ģ������ר�����ˣ�������α궨��֤���������ڿ��˲�����
2������ͷ��ѧ����
(1)ͨ��������������ͷ���ڲα궨�����ɱ궨�ļ���ͬʱ��ʵ�ֵ�Ŀ�ڲα궨ǰ��Ч���Աȣ�ֱ��չʾ����������á�
(2)�ṩ�����������������㷨��YOLO ��Ŀ��ʶ���㷨��ROI����Ȥ���������㷨�����ѧϰ������ʶ���㷨�����ѧϰ��Ŀ����㷨����������㷨����ɫ���㷨�����Ƕೡ���Ӿ���֪ʵѵ����
(3)��ͨ�����ز�ͬʶ���㷨��������ʾ��ͬ��ʶ���ܣ����в�ͬ��Ŀ�Ĺ���ʵѵ��
(4)��������Դ���룬�ɵ�������ͷʵʱ���ݡ�¼�Ƶ����ݰ�����Ƶͼ�������ͼ��
��(5)����ROS2ϵͳ������֧��������������ģ��� ROS2 ��������������ʵ�����ݵĽ������ںϡ�
(6)�������ż��γ��ĵ����������롢���Ĺ��ܽ���������������ϸ˵������������������������
��(7) �ײ��㷨��Դ��֧�ֻ����� ROS2 �ڵ㲿��ͼ�����ݶ������ӡ����ʵ��ͼ���ȡ����ӻ���Ŀ���⡢������ʶ��ȹ��ܡ������ṩ��Ƶ��ʾ��
��(8)ģ������ר�����ˣ�������α궨��֤���������ڿ��˲�����
3�����ײ���ѧ����
(1)ϵͳ�ṩ�˻��Ѻý������棬��ʵʱ�����״�������ã��۲����Ч����
(2)��ȷʶ��̬�붯̬�ϰ����ʾ���롢�ٶȡ�λ�õ����ݡ�
(3)�������ú��ײ��״���x��y�ϵ�����ֵ��ʵ���ⲿ�����ı궨����ʾ�궨��ĺ��ײ����ͼ����x��y�������Կ����ϰ������������ԭ��ı仯���������ͨ��ROI�������ã�ʵ�����������ϰ�������ˡ�
��(4)����ROS2ϵͳ������֧��������������ģ��� ROS2 ��������������ʵ�����ݵĽ������ںϡ�
(5)�������ż��γ��ĵ����������롢���Ĺ��ܽ���������������ϸ˵������������������������
��(6)�ײ��㷨��Դ��֧�ִ�ԭʼ CAN �����й�����Ч���� ID���������ϰ�������/������롢����ٶȵȺ������ݣ���ͨ�� ROS2 �������������ͬʱʵ�ּ��Ŀ��ĵ��ƾ���Ϳ��ӻ��������ṩ��Ƶ��ʾ��
��(7)ģ������ר�����ˣ�������α궨���������ÿ��˲�����
4���������״��ѧ����
(1)������ģ���ʵ�ֽ������࣬��ʵʱ���ظ�̽ͷ̽��������ݣ�ֱ����ʾ��ͬλ���µ�̽�⾫������Ч��Χ��
(2)�������ż��γ��ĵ����������롢���Ĺ��ܽ���������������ϸ˵������������������������
��(3)�ײ��㷨��Դ����ʵ�� ROS2 �����������𡢹��ܰ��������У�ʵ��ԭʼ CAN ����֡��ӡ������ܴ���Ч�����н�����������̽ͷ��̽��������ݣ�����Ч�������ͨ�� ROS2 �������ⷢ����
��(4)ģ������ר�����ˣ����Ƕ�̽ͷ���˲�����
5����Ϲߵ���ѧ����
(1)������ϵ����궨��������ϵ���������Ϣ������ʵʱ��ȡGNSS�������ݼ��ߵ���̬���ݣ���ʹ�ô���ָ���ģ��������á�
(2)�豸�߱�RTK��ֶ�λ���ܣ��ɽ���RTK��ֶ�λϵͳԭ����ѧʵѵ��
(3)�������ż��γ��ĵ����������롢���Ĺ��ܽ���������������ϸ˵������������������������
��(4)�ײ��㷨��Դ����ʵ�� ROS2 �����������𡢹��ܰ��������м��������õȻ���������ʵ�� IMU �� GPS �������ݲɼ����������������ⷢ�������IMUԭʼ�������ݡ�GPS ��λ���ݡ������ṩ��Ƶ��ʾ��
��(5) ģ������ר�����ˣ������豸�������á�RTK ��λ���˲����������ṩ��Ƶ��ʾ��
6�����ϱ궨���֪�ںϽ�ѧ����
��(1)֧�ֶ�ά�����ϱ궨���ܣ���ʵ�ֵ�Ŀ����ͷ�뼤���״��Ŀ����ͷ����ײ��״��Ŀ����ͷ�뼤���״�����ײ��״�������ϵ����ϱ궨�����ɶ�Ӧ����λ������֧�ֱ궨������������ء������ṩ��Ƶ��ʾ��
(2)���ڱ궨���ʵ�ֶഫ������֪�ں�Ч�����ӻ�����ֱ��չʾ����ͷ������Ϣ�������״�3D�ռ���Ϣ�����ײ��״��ٶȾ�����Ϣ�ļ�����ʾ���������ָ��������������ơ�
(3)�ںϽ��֧�ֶ���ͼչʾ�����л�����ͷ�ӽǼ��״��ӽǡ�
��(4)����ROS2 ϵͳ������ʵ�ָ����������ݵ�ʵʱ���ġ��������ںϣ���֤���ݽ����ĵ��ӳ����ͬ���ԡ������ṩ��Ƶ��ʾ��
(5)ģ������ר�����ˣ����Ƕ�������ϱ궨���ںϿ��˲�����
��������
����������������ϵͳ
ʾ��̨
1.
������������
������ʾ��̨
�����βο�ͼ���Խ���ʵ��Ϊ��
��1��ʾ��̨������������������ϵͳ����ģ�����ʹ�ã�������ʾ��̨��ʵ��ʵʱ�������ϸ����������Ķ���̬�źŲ����������������ټ����״������ͷ���Ӿ������������ۺ��ײ��״�ܼ��ɹ��������Ǻ�GNSS����϶�λ��Ԫ�����Ե��������������ݳ������״ﴫ������
��2����������� 4mm ����ʴ���ʹ���������Ⱦ�����𡢷����ĸ����ܰ壬���澭�������Ϳ���ᴦ�������UV����ӡ�д�������ɫ�ṹԭ��ͼ������װ�����������ӣ�ѧԱ��ͨ�����յ�·ͼ��ʵ������ͷ������������Ľṹԭ���������̡�
��3����ܲ���40×40/40×40Rһ�廯ȫ���Ͻ��ͲĴ��������ʴ��������̨࣬���40CM,��ѹ���ε�����Բ��̨�澭�����ò����⣬��4��������װ��������֣������ƶ���
��4�������������ѹ���Σ������ϲ�Բ����ƣ������˫��ά���ţ�����ά���뱣����
��5���䱸����ģ�����ų�ϵͳ���ɶԴ�������·���ж�·����·����ӡ�������ӵȹ������ú���ϡ�
��6����ʵ�ִ������İ�װ��궨�����������ʵѵʵ�顣
��7��ʾ��̨��
ƽ̨��壨�ߴ磺1192×694×4mm����
ƽ̨���Ͻ�̨�ܣ��ߴ磺1200×450×1750mm����
�ƶ����֣�4������
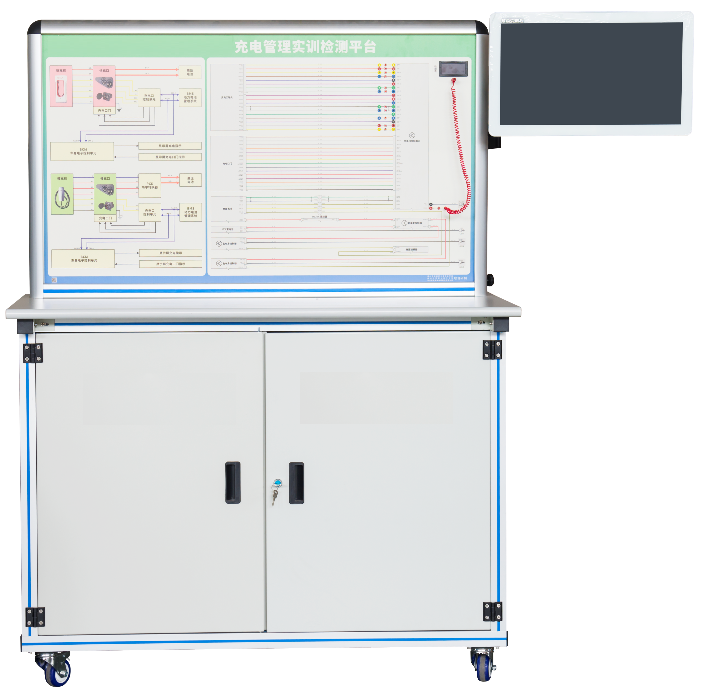
2.�߿ص���ʾ��̨
�����βο�ͼ���Խ���ʵ��Ϊ��
��1��ʾ��̨������������������ϵͳ����ģ�����ʹ�ã��߿ص���ʾ��̨��ʵ��ʵʱ���������߿ص��̵��ϵͳ�Ķ���̬�źŲ������������߿����������߿ػ��������߿��ƶ������߿�ת���߿ص�������������VCU��
��2����������� 4mm ����ʴ���ʹ���������Ⱦ�����𡢷����ĸ����ܰ壬���澭�������Ϳ���ᴦ�������UV����ӡ�д�������ɫ�ṹԭ��ͼ������װ�����������ӣ�ѧԱ��ͨ�����յ�·ͼ��ʵ������ͷ������������Ľṹԭ���������̡�
��3����ܲ���40×40/40×40Rһ�廯ȫ���Ͻ��ͲĴ��������ʴ��������̨࣬���40CM,��ѹ���ε�����Բ��̨�澭�����ò����⣬��4��������װ��������֣������ƶ���
��4�������������ѹ���Σ������ϲ�Բ����ƣ������˫��ά���ţ�����ά���뱣����
��5���䱸����ģ�����ų�ϵͳ���ɶԴ�������·���ж�·����·����ӡ�������ӵȹ������ú���ϡ�
��6����ʵ���߿ص��̵İ�װ��궨�����������ʵѵʵ�顣
��7��ʾ��̨��
ƽ̨��壨�ߴ磺1192×694×4mm����
ƽ̨���Ͻ�̨�ܣ��ߴ磺1200×450×1750mm����
�ƶ����֣�4������
����ʵѵ���飩��Ŀ
1.
��������װ
��
�ͱ궨
�����������ټ����״������ͷ���Ӿ������������ۺ��ײ��״�ܼ��ɹ��������Ǻ�GNSS����϶�λ��Ԫ�����Ե��������������ݳ������״ﴫ������
2.�߿ص���ϵͳ��װ�������
�߿ص��̰������߿����������߿ػ��������߿��ƶ������߿�ת���߿ص�������������VCU��
3.������������ģ����֪���������ʵѵ��
4.��ͼ��Դ����������㷨Ӧ��ʵѵ
5.ϵͳ�ӿ�����������Ų�ʵѵ
6.ʵ�����ݴ����͵�ͼ����ʵѵ
7.���Ƶ�ͼ����ʵѵ
8.С��ѭ�����Զ���ʻ����ʵѵ
9.�߾���ͼ�Զ���ʻʵѵ
10.����������������
���ض��� ��
��վ��ҳ
|
��������
|
��Ʒչʾ
|
��������
|
�ۺ����
|
��������
|
��Ʒ����
|
��ϵ����
��ز�Ʒ��
֧����
,
�ٶ�
,
��������:
�ƻ�ģ��ʵ�����豸
,
���䣺285729858@qq.com
��ICP��16028912��-1